ООО ИВФ «Микротех»
micro-tech@list.ru
телефоны: (473)224-03-53,
(473)223-43-77
сервис: (473)224-08-90
Чат в «Телеграме»
Прайс-лист
Промышленный контроллер «Карат-104»: структура, применение и алгоритм работы
Уже более 10 лет ИВФ «Микротех» производит контроллеры технологических процессов. С 2006 года мы поставляем «Караты» Всероссийскому научно-исследовательскому институту комбикормовой промышленности для включения в комплексы хранения, переработки и использования растительного сырья. Наши промышленные контроллеры установлены на предприятиях Омска, Уссурийска, Пскова, Серпухова, Воронежской области (в Терновке, Верхней Хаве, Калаче, Бутурлиновке), Белоруссии. Идут переговоры о поставке «Каратов» в Египет.
В этой статье мы расскажем, как устроен «Карат-104», для чего он применяется и как с ним работать.
Статьи по теме
31 декабря 2014
Приоткрываем дверь в будущее (cписок статей цикла о наноэлектронике)
Контроллер промышленный (КПР) — это комплекс из электронного устройства и программного обеспечения, предназначенный для автоматизации управления технологическим оборудованием предприятия: отдельной единицей (например, станком) или группой оборудования, включённого в единый технологический процесс.
Структура устройства
Аппаратная часть контроллера состоит из набора модулей, которые могут быть установлены в едином металлическом корпусе. Центральный элемент — это модуль управления (МУ), работающий на базе микроконтроллера со своим программным обеспечением (ПО).

Рисунок 1. Контроллер и пульт. Руководитель проекта по разработке контроллера — Кравцов Игорь Алексеевич.
Модуль управления оснащён необходимым набором интерфейсов для соединения с модулями исходящей управляющей информации (МИУ) и с модулями входящей контрольной информации (МВК). Также МУ имеет интерфейсы общего назначения для соединения с компьютером (PC (от англ. personal computer) или ПУ (пультом управления)) и для соединения с другими КПР, например, подключёнными к иным технологическим линиям объекта.
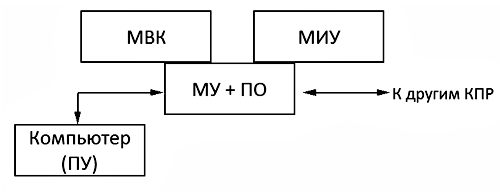
Рисунок 2. Общая структура КПР «Карат-104».
РС (ПУ) в процессе управления оборудованием не участвует. Он предназначен:
- для подготовки и трансляции алгоритма работы контроллера;
- для загрузки алгоритма (см. примечание);
- для старта выполнения алгоритма;
- для контроля за выполнением алгоритма;
- для остановки выполнения алгоритма.
Примечание. В процессе эксплуатации загрузка алгоритма не требуется (даже может быть заблокирована, например, в целях безопасности): к этому времени алгоритм должен быть разработан и отлажен, а во время пуско-наладочных работ — проверен и исправлен.
Контроллер для завода по производству комбикормов
На рисунке 3 КПР, разработанный для завода в Гомеле (Беларусь), представлен в максимальной конфигурации — это 144 входа и 132 выхода:
- модуль управления (МУ);
- три модуля входных (МВК), имеющих по 48 входов каждый;
- четыре модуля выходных (МИУ), имеющих по 32 выхода каждый.
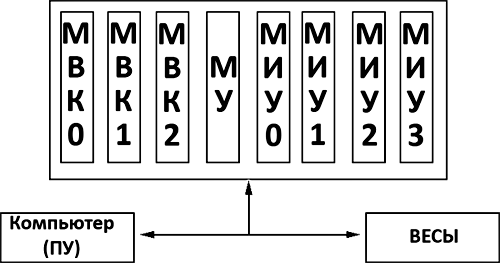
Рисунок 3. КПР в максимальной конфигурации.
Управляет технологическим оборудованием модуль управления, в который загружен специальный алгоритм и технологические данные (в приведённом примере это рецепт комбикорма). Для связи модуля управления с модулями входных и выходных линий внутри КПР предусмотрен восьмиразрядный канал связи. С РС (ПУ) и весовым терминалом контроллер соединяется двумя последовательными стандартными интерфейсами типа RS-485.
«Карат-104», разработанный для гомельского завода, представляет собой набор модулей в металлическом корпусе, установленный в шкаф, в который сводятся все провода от оборудования — как управляющие, так и сигнальные.
Работа с контроллером
Алгоритм для модуля управления должен разрабатываться специалистами, хорошо знакомыми с технологией производства. При этом на первом этапе кроме бумаги и карандаша ничего больше не требуется. PC (ПУ) в данном случае необходим для окончательной обработки и отладки алгоритма.
Ввод алгоритма в компьютер осуществляется в текстовом виде при использовании любого текстового редактора (например, «Блокнота» в Windows, gedit в Ubuntu или TextEdit в Mac OS). При описании алгоритма необходимо соблюдать некоторые правила, которые необходимы для дальнейшей машинной обработки этого описания.
После ввода алгоритма производится его трансляция и загрузка в МУ. Затем при наличии физического имитатора линии (набора лампочек и выключателей) можно запускать и отлаживать работу алгоритма.
МУ не работает под управлением общепринятых компьютерных программ, предназначенных для какой-либо операционной системы, и не имеет непосредственного выхода на стандартные внешние сети. Вместе с контроллером поставляется пульт «Карат», с помощью которого и производится управление МУ. При желании заказчик контроллера может заказать разработку программы управления с удобным интерфейсом для той или иной операционной системы.
При обмене информацией между РС и модулем управления используется простейший протокол (modBUS-подобный) с ограниченным набором команд: «Старт», «Стоп» и команд чтения информации о состоянии устройств, получаемой по ходу выполнения алгоритма.
Возможности эксплуатации контроллера
При необходимости защиты от человеческого фактора можно реализовать более замкнутый режим работы устройства. Например, запуск исполнения алгоритма при включении питания либо по совершении какого-либо события (такого как нажатие кнопки). При этом через интерфейс общего доступа RS-485 можно получать информацию об исполнении алгоритма, но команды «Старт» и «Стоп» уже не работают. Можно даже так разработать алгоритм, что разрешение на исполнение команд будет инициироваться самим алгоритмом.
Бывают случаи, когда на одном объекте требуется установить несколько «Каратов» на независимые автоматические линии, не связанные в единую технологическую цепочку. Тогда контроллеры объединяются через интерфейс общего доступа — RS-485. Структура нашего КПР позволяет объединять до восьми контроллеров в одну группу под управлением одного РС.
Возможен вариант создания такой группы контроллеров, в которой будут как КПР, объединённые в единый технологический процесс и связанные между собой каналами передачи данных, так и отдельные КПР, управляющие независимыми технологическими линиями. Однако в этом случае потребуется более мощный микроконтроллер в центральном модуле управления, а также более мощное программное обеспечение, позволяющее отлаживать виртуальные модели объектов.
Разработка алгоритма
Для написания алгоритма работы контроллера предусмотрен набор стандартных логических примитивов — базовых единиц языка программирования. Число примитивов невелико, а потому их изучение и использование не составит особого труда. Суть работы контроллера заключена в обработке состояний примитивов, из которых пользователь построит свой алгоритм.
Библиотека логических примитивов контроллера содержит:
- примитивы логических функций («И», «ИЛИ»);
- примитив триггера (отдельная ячейка запоминания);
- примитив задержки по времени;
- счётчик событий;
- компаратор (элемент, выполняющий функцию сравнения двух объектов).
Алгоритм всегда можно разбить на отдельные логически завершённые фрагменты — алгоблоки. Этот приём является традиционным и повышает эффективность разработки. Для реализации такой возможности в библиотеку контроллера добавлен особый набор специальных примитивов:
- примитивы входов и выходов, которые предназначены для сопряжения потоков данных, поступающих в алгоблок и исходящих из него;
- примитив «Стоп», фиксирующий остановку работы алгоблока;
- примитив управления состоянием алгоблока.
Для разработки описания отдельных алгоблоков и алгоритмов, состоящих из готовых алгоблоков, предусмотрен набор специальных символов. Их применение является обязательным, так как программа-транслятор при анализе описания будет пользоваться этими символами.
Во-первых, это набор латинских букв, которыми описываются схемы алгоритма: L, A, P, I, O, N. Например, L — линия, A — алгоблок, P — примитив и т.д.
Во-вторых, это десятичные числа, которые используются для нумерации линий, алгоблоков, примитивов, а также для записи данных (например, константы в алгоритмах и уставки в рецептах комбикорма).
© ИВФ «Микротех», полное или частичное копирование материала без указания прямой ссылки на первоисточник запрещено.
 Просмотров - 4050
Просмотров - 4050
 Добавлено - 6 апреля 2015
Добавлено - 6 апреля 2015
Каталог
Популярные товары


